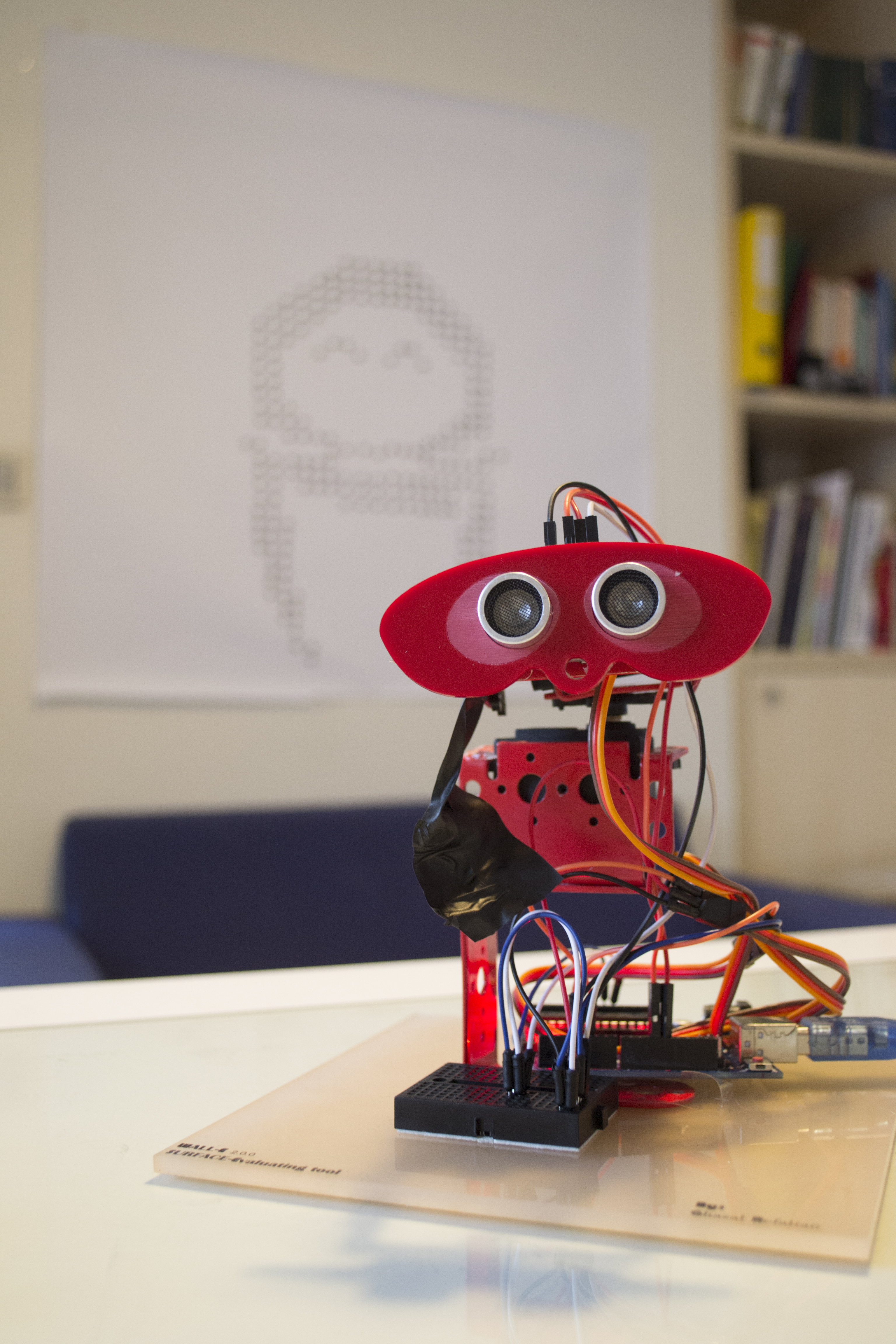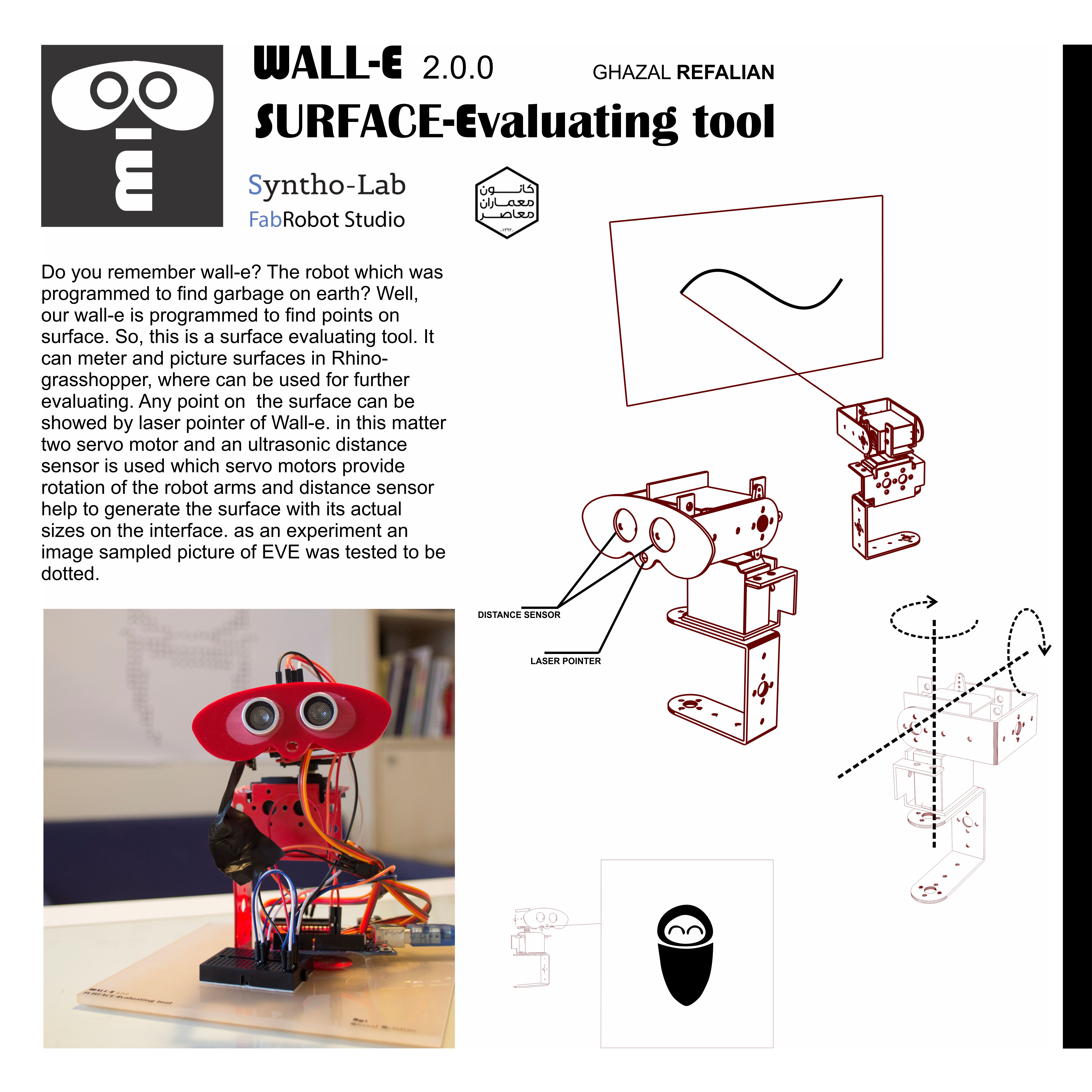
Do you remember wall-e? The robot which was programmed to find garbage on earth? Well, our wall-e is programmed to find points on surface. So, this is a surface evaluating tool. It can meter and picture surfaces in Rhino-grasshopper, where can be used for further evaluating. Any point on the surface can be showed by laser pointer of Wall-e. in this matter two servo motor and an ultrasonic distance sensor is used which servo motors provide rotation of the robot arms and distance sensor help to generate the surface with its actual sizes on the interface. as an experiment an image sampled picture of EVE was tested to be dotted.